27. November 2024 | Online | 15:30 bis 17:00 Uhr
Die Vorstellung der Projektketten-Treffen ist eine attraktive und informative Online-Veranstaltung, die es allen Projekten des HortiSustain-Programms ermöglicht, ihre Forschungsansätze und -ergebnisse der HortiSustain-Gemeinschaft vorzustellen. Am Ende jeder Projektvorstellung haben die Teilnehmer der Online-Veranstaltung die Möglichkeit, Fragen zu stellen und mit den Projektleitern zu interagieren, was die Veranstaltung nicht nur lehrreich, sondern auch sehr interaktiv und wertvoll für alle Beteiligten macht.
Die Austauschaktion ermöglicht auch ein nachhaltiges Netzwerk auf nationaler Ebene und erleichtert den Austausch zwischen allen Beteiligten.
In unserer dritten Online-Sitzung stellten drei weitere Projekte ihre Forschungsthemen vor:
- JaetRobi: herbizidfreie Beikrautregulierung in gesäten Gemüsekulturen – aktueller Stand und Herausforderungen.
- Kretschab: Kontrolle der Rostmilbe in Tomaten unter biologischen Anbaubedingungen.
- MaeuseMoehre: Schadnager-Management im ökologischen Möhrenanbau.
 Agenda © Dr. Michaela Kirndörfer
Agenda © Dr. Michaela KirndörferErgebnisse/ Ausblick/ Fragen
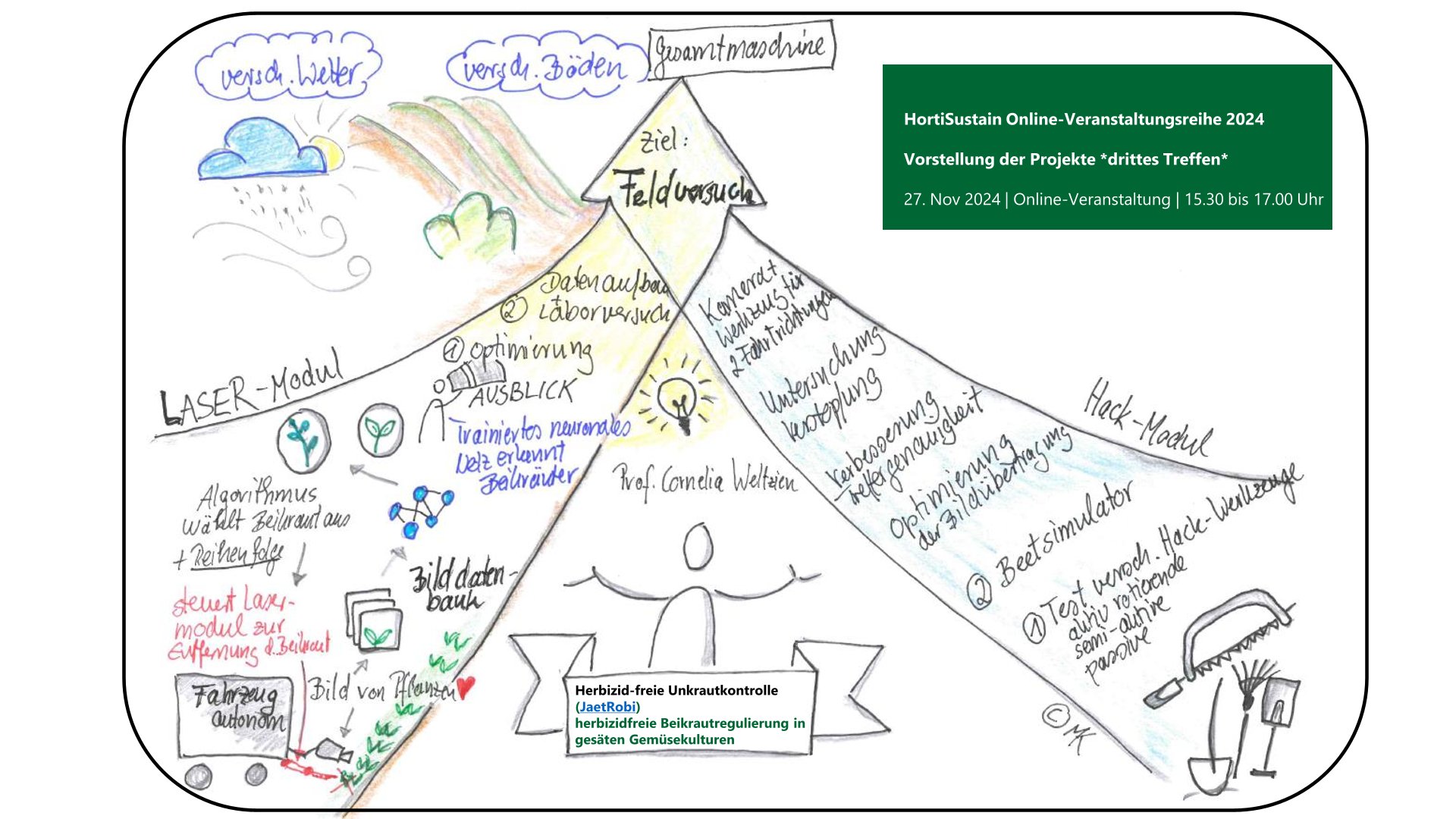 Projekt JaetRobi © Dr. Michaela Kirndörfer
Projekt JaetRobi © Dr. Michaela Kirndörfer
1. JaetRobi: Automatisierte, herbizidfreie Unkrautregulierung in gesäten Gemüsekulturen – Sensorik, Bilddatenbank und Aktorik
JaetRobi soll eine herbizidfreie, automatisierte Unkrautbekämpfung in direkt gesäten Gemüsekulturen ermöglichen – für den einzelnen Gartenbaubetrieb, mit praxistauglichen Geräten. Ziel ist es, a) die Unkrauterkennung durch den Einsatz neuer Transfer-Learning-Systeme und die Entwicklung einer Open-Source-Bilddatenbank für das Training neuer Szenarien universeller und breiter einsetzbar zu machen und b) die Stabilität und Flächenleistung der Unkrautbekämpfungsgeräte durch Optimierung von Design und Steuerung zu verbessern. Bisher wurden zwei Schlüsselkomponenten für die automatisierte, herbizidfreie Unkrautbekämpfung im Gemüsebau erfolgreich entwickelt: 1. das Lasermodul: Dieses Modul nutzt ein trainiertes neuronales Netz zur präzisen Erkennung und Entfernung von Unkraut und gewährleistet so eine exakte Ausrichtung auf unerwünschte Pflanzen. 2. das Hackmodul: Dieses Modul konzentriert sich auf die selektive aktive und passive mechanische Unkrautbekämpfung (die Messer bewegen sich in den Boden hinein und wieder heraus, wo sich das Unkraut befindet, und die Bewegung des Moduls zerkleinert das Unkraut) und bietet eine effiziente und umweltfreundliche Lösung für die Unkrautbekämpfung im Gartenbau. In Laborversuchen wurde der Hackvorgang mit Hilfe eines „Beetsimulators“ untersucht. Dabei wurden Testobjekte (Raps) in Pflanzkästen gesät. Der Pflanzkasten wurde dann unter das Hackmodul gefahren, wo ein Triggersignal das Werkzeug aktivierte. Es sind Feldversuche in 2025 geplant, um die Bildauswertung und die Werkzeugsteuerung unter realen Bedingungen zu testen und das Verstopfungsverhalten zu untersuchen. Diese Versuche werden in Friedrichsgabekoog (Westhof) und Marquardt (ATB) durchgeführt.
Diskussion: In der Diskussion wurden Fragen zur Geschwindigkeit der Unkrautbekämpfung (6 km/h) gestellt, ob das Modul nur für Grabenfelder vorgesehen ist (in einem zweiten Schritt sind Tests auf verschiedenen Böden geplant) und ob der Operator in Zukunft alles alleine bedienen kann (derzeit laufen Versuche mit Unterstützung einer Fachkraft auf dem Feld, aber das endgültige Konzept ist ein vollautomatisches Unkrautbekämpfungssystem).
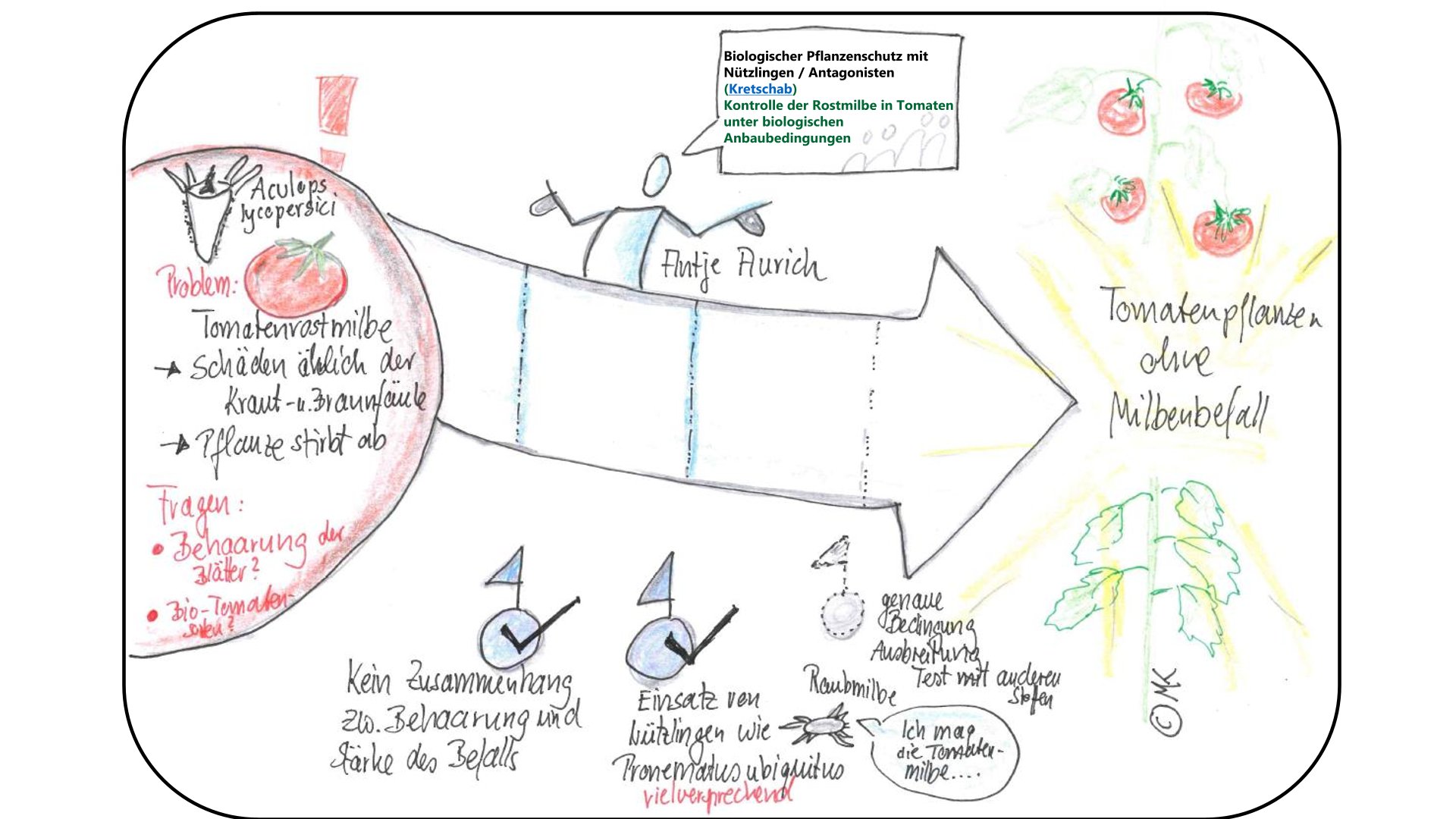
Kretschab: Kontrolle der Rostmilbe in Tomaten unter biologischen Anbaubedingungen
Ziel des Vorhabens ist es, effektive Strategien zur Vermeidung von ertragsrelevanten Schäden an Pflanzen und Früchten biologisch angebauter Tomaten durch die Tomatenrostmilbe Aculops lycopersici (Acari: Eriophyidae) zu entwickeln, die mit einem Minimum an Pflanzenschutzmitteln auskommen. Die Hauptziele des Projekts sind:
- Optimierung des Nützlingseinsatzes: Neben Amblyseius swirskii (Acari: Phytoseiidae), der bereits als Standardnutzinsekt in vielen geschützten Kulturen eingesetzt wird, werden Raubmilbenarten der Gattungen Homeopronematus und Pronematus getestet. Untersucht werden unter anderem die Überwinterung von Raubmilben und der beste Zeitpunkt für ihren Einsatz.
- Empfehlungen für Tomatensorten: Die Ergebnisse zeigen, dass es keinen erkennbaren kausalen Zusammenhang zwischen der Behaarung und der Stärke des Rostmilbenbefalls gibt, während Untersuchungen zum sortenabhängigen Verhalten der Raubmilben noch ausstehen. für den praktischen Einsatz.
- Der Einsatz von physischen Barrieren: Die Formulierungen Micula (Pflanzenschutzmittel), Trifolio-S-Forte (Zusatzstoff), Sonnenblumenöl (Rohstoff)) werden auf ihre Wirksamkeit gegen die Tomatenrostmilbe und ihre Selektivität gegen Raubmilben getestet. Um die praktische Relevanz und Durchführbarkeit der Ergebnisse zu gewährleisten, werden strenge Versuche sowohl in Versuchskulturen als auch in Praxisbetrieben durchgeführt.
Diskussion: Leider konnte aufgrund der Länge des Vortrags keine Fragerunde durchgeführt werden.
 Projekt Kretschab © Dr. Michaela Kirndörfer
Projekt Kretschab © Dr. Michaela Kirndörfer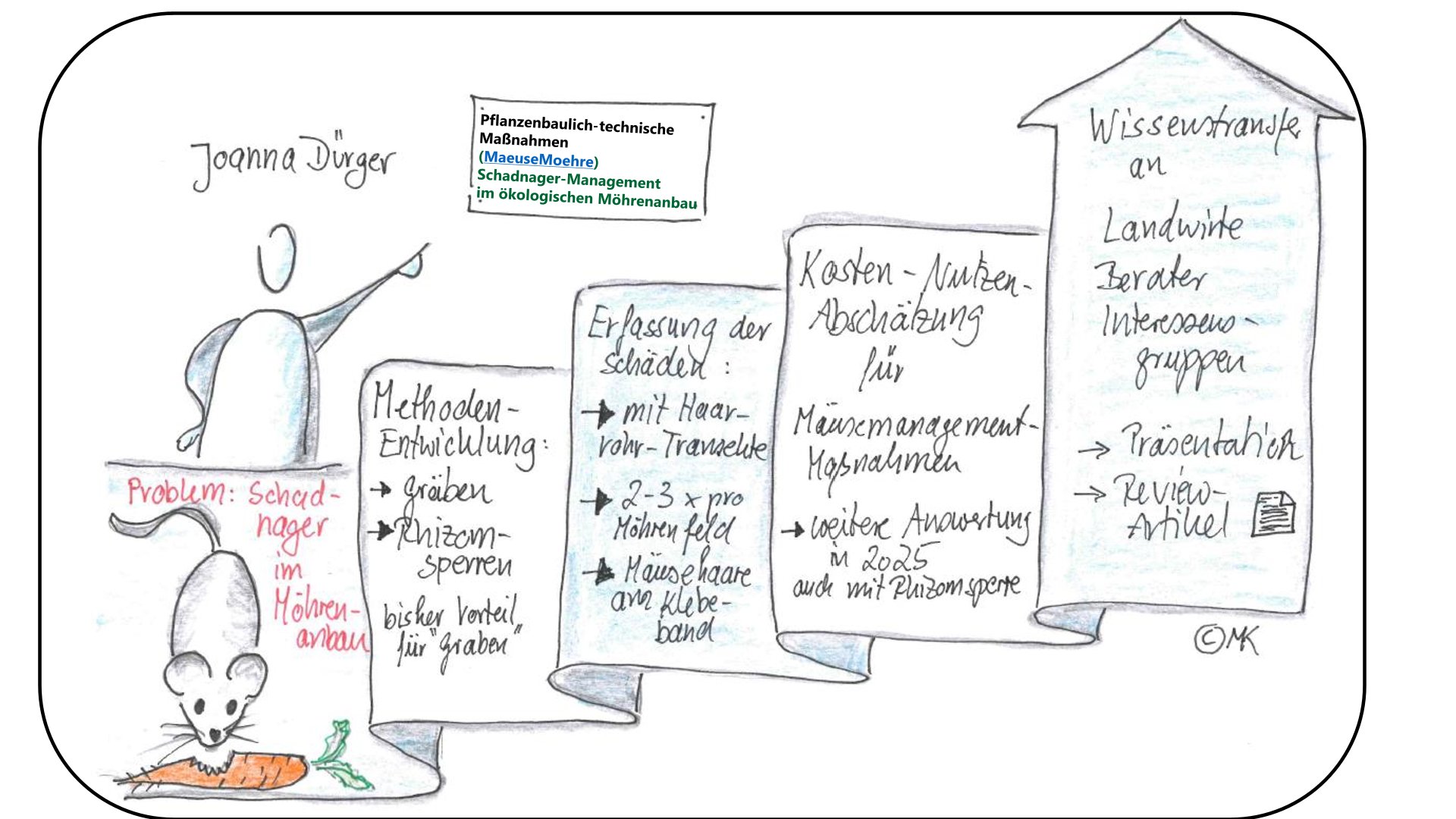 Projekt MaeuseMoehre © Dr. Michaela Kirndörfer
Projekt MaeuseMoehre © Dr. Michaela KirndörferMaeuseMoehre: Nicht-chemische Verfahren zum Management von Schadnagern im ökologischen Möhrenanbau
Im Projekt „MäuseMöhre“ werden nicht-chemische Methoden zum Management von Schadnagern im ökologischen Möhrenanbau entwickelt und getestet. Neue und bestehende Methoden wie Mäusegräben und Rhizomsperren im Vergleich zu unbehandelten Kontrollparzellen werden in Freilandversuchen hinsichtlich Mäuseauftreten, Möhrenschäden und Ertrag untersucht. Haarröhrchen und PC-Analyse der Haardichte werden verwendet, um die Aktivität der Feldmäuse zu testen. Die Ergebnisse sind noch nicht abschließend. Direkte Kosten und Nutzen werden mit standardisierten Kosten-Nutzen-Berechnungsmethoden berechnet, die an die untersuchte Situation angepasst sind. Voruntersuchungen im Jahr 2023 zeigen einen wirtschaftlichen Vorteil der Mäusemanagementmaßnahme „Graben“. Nächste Schritte sind die Auswertung weiterer Versuchsjahre, die Erstellung einer Szenarioanalyse und die Berücksichtigung indirekter Effekte.
Diskussion: In der Diskussion wurden Fragen zu den verwendeten Materialien gestellt: ob die Mäusegräben und Rhizomsperren aus kompostierbaren Materialien bestehen (nein, aber sie werden nur für kurze Zeit verwendet und dann entfernt, so dass sie nicht in die Umwelt gelangen). Ob Roboter für die Platzierung und den Transport der Mäusegräben und Rhizomsperren eingesetzt werden könnten (in diesem Stadium der Forschung nicht geplant) und warum keine natürlichen biologischen Rodentizide getestet werden (zunächst nicht geplant, kann aber in einem späteren Projekt in Betracht gezogen werden).
Zukunftsaussichten
Geplante weitere Maßnahmen:
- Dezember 2024 / Januar 2025: Durchführung einer kurzen Ja/Nein-Online-Umfrage, um ein allgemeines Feedback zu erhalten, das Format der Sitzung zu bewerten und die Themen und Interessen der Teilnehmer zu erfassen.
- Februar / März 2025: Online-Workshop - Zulassungsbedingungen für nicht-chemische Pflanzenschutzmittel (Anforderungen, Verfahren und nicht-lebenden Naturstoffen und Zulassungsmechanismen auf europäischer und nationaler Ebene).
- Aktualisierung der Projektergebnisse und laufenden Förderungen im Bereich Gartenbau und Nachhaltigkeit auf der Website (https://www.hortisustain.de/)
Ende Veranstaltung 16: 55 Uhr