Automatisierte, herbizidfreie Unkrautregulierung in gesäten Gemüsekulturen – Sensorik, Bilddatenbank und Aktorik
Hintergrund
Um Nährstoff- und Lichtkonkurrenz für die Kulturpflanze zu vermeiden, sollten Beikräuter schnellstmöglich entfernt werden. Insbesondere bei gesäten Kulturen mit langsamer Jugendentwicklung wie Möhre, Rote Beete aber auch Speisezwiebel oder Kräuter ist es notwendig, Beikräuter frühzeitig in der unmittelbaren Umgebung der Kulturpflanzen zu entfernen. Im ökologischen Landbau ist der Einsatz von chemischen Pflanzenschutzmitteln nicht zulässig. Daher erfolgt die Regulierung von Beikräutern hier über angepasste Anbau- und Bodenbearbeitungsverfahren, wie z.B. Striegeln oder Hacken. Speziell gesäte Gemüsekulturen im ökologischen Anbau können, innerhalb der Reihe, bisher nur durch manuelles Hacken von Beikraut freigehalten werden, was zu erheblichen Arbeitsaufwänden von ca. 200 AKh/ha führt [1]. Für die Sicherstellung einer nachhaltigen Gartenbauproduktion sind alternative Methoden zur Beikrautregulierung notwendig, da das manuelle Jäten sehr mühsam, zeit- und kostenintensiv ist und es immer schwieriger wird geeignete Arbeitskräfte zu finden.
Projektziel
Manuelles Jäten kann durch eine automatisierte, herbizidfreie Beikrautregulierung ersetzt werden. Bisherige Ansätze für das automatische Jäten in gesätem Biogemüse sind jedoch kaum praxistauglich. Die aktuellen Herausforderungen liegen in der begrenzten Übertragbarkeit von KI-basierten Sensoren auf unterschiedliche Einsatzbedingungen sowie in der unzureichenden Leistung und Stabilität der Werkzeuge zur Beikrautregulierung.
Im Projekt JaetRobi arbeiten Forschende und Industriepartner daran, eine praxistaugliche Lösung für die automatisierte, herbizidfreie Beikrautregulierung in gesäten Gemüsekulturen zu entwickeln. Es entstehen Module, die auf verschiedene Trägerfahrzeuge montiert werden können und in einem Arbeitsgang Beikräuter sowohl erkennen als auch gezielt zwischen den Nutzpflanzen entfernen.
Die Hauptziele des Projekts JaetRobi sind:
- eine universell einsetzbare Beikrauterkennung durch den Einsatz neuer Lernsysteme und den Aufbau einer Open-Source-Bilddatenbank, die das Training der Systeme für unterschiedliche Szenarien ermöglicht;
- die Verbesserung der Stabilität und Effizienz der Werkzeuge durch Optimierung von Konstruktion und Steuerung.
Am Ende der dreijährigen Projektlaufzeit soll ein Funktionsmuster für die automatisierte Beikrautregulierung in gesäten Gemüsekulturen zur Verfügung stehen. Der praxisorientierte Ansatz zielt darauf ab, durch den Austausch von Wissen und Felddaten praktische Lösungen für Landwirte bereitzustellen.
Methode
Die Grundlage für die in JaetRobi entstehenden automatisierten Beikrautregulierungsmodule ist ein bestehendes System der Firma nAIture, das durch optische Sensoren Möhren- und Zwiebelfelder scannt, Beikräuter detektiert und diese dann mit schmalen rotierenden Werkzeugen entfernt.
Nach Angaben des Herstellers (nAIture) ist dieses System unter bestimmten Anbaubedingungen so leistungsfähig, dass nur 6 Prozent der beseitigten Pflanzen Nutzpflanzen sind. Zum Vergleich: Bei der Beseitigung per Hand werden etwa 9 Prozent versehentlich entfernt – und das nur bei sehr präziser Arbeit. Im Projekt JaetRobi wollen wir das System universeller einsetzbar machen und durch den Aufbau alternativer Beseitigungsmethoden vergleichende Tests durchführen.
Mit der Unterstützung und Beratung aller Projektpartner werden parallel zwei Systeme entwickelt, die skalierbar sowohl in Anbaurahmen als auch in einen Feldroboter integriert werden können:
- Firma HYDRIVE entwickelt zusammen mit Forschern der Technischen Universität Dresden ein Hackmodul zur mechanischen Beikrautbeseitigung. Ein Magazin von 15 mm schmalen und kostengünstigen Werkzeugen ermöglicht es, dass mehrere Werkzeuge parallel arbeiten können. Ziel ist es, so eine Fahrgeschwindigkeit von bis zu 1 m/s zu ermöglichen.
- Forscher*innen am Leibniz-Institut für Agrartechnik und Bioökonomie (ATB) in Potsdam und der Technischen Universität Berlin entwickeln gemeinsam ein Laserportal, dessen Aktuator auf einer Parallelroboterkinematik basiert und mit blauen 36W-Diodenlasern (445 nm) ausgestattet ist. Eine auf Bilderkennnung basierende Vorsteuerung positioniert den Diodenlaser präzise und dynamisch über der Beikrautpflanze. In einem weiteren Feinsteuerungsschritt wird der Laser exakt auf das Wachstumsherz der Beikrautpflanze ausgerichtet. Hierzu wird eine weitere Kamera direkt am Aktuator fixiert um mittels Bilderkennung und künstlicher Intelligenz das Herz der Beikrautpflanze zu erfassen. So wird die maximale Wirkung des Lasers sichergestellt, dies verkürzt die erforderliche Bestrahlungszeit und reduziert die notwendige Laserleistung.
Derzeitige Ergebnisse
Neben der Variante der Firma nAIture mit aktiv angetriebenen mechanischen Werkzeugen sind bereits zwei weitere Module mit passiven und semi-aktiven Werkzeugen entstanden. Diese Module werden aktuell in Labor- und Feldversuchen getestet, um die unterschiedlichen Funktionsweisen vergleichen zu können (siehe Abb. 2 und 3). Gleichzeitig wird an der Optimierung der Steuerung gearbeitet, um auch bei höheren Fahrgeschwindigkeiten bis zu 1 m/s eine präzise Bearbeitung zu gewährleisten.
 Abbildung 2: Realisierung und Test des Hackmoduls mit passiven Werkzeugen unter Praxisbedingungen. Die ersten Feldtests nach erfolgreicher Inbetriebnahme des Gesamtsystems mit Bilderkennung, Steuerung und Mechanik konnten im Juli 2024 durchgeführt werden © S Schwede, TUD
Abbildung 2: Realisierung und Test des Hackmoduls mit passiven Werkzeugen unter Praxisbedingungen. Die ersten Feldtests nach erfolgreicher Inbetriebnahme des Gesamtsystems mit Bilderkennung, Steuerung und Mechanik konnten im Juli 2024 durchgeführt werden © S Schwede, TUD
 Abbildung 3: Laboruntersuchung zur Werkzeug-Boden-Pflanze Interaktion des mechanischen Hackmoduls mit rotierenden Werkzeugen (System der Fa. nAIture). Dabei werden einzelne Pflanzen im Keimblattstadium (Raps) gehackt und mittels Hochgeschwindigkeitsaufnahmen ausgewertet © S Schwede, TUD
Abbildung 3: Laboruntersuchung zur Werkzeug-Boden-Pflanze Interaktion des mechanischen Hackmoduls mit rotierenden Werkzeugen (System der Fa. nAIture). Dabei werden einzelne Pflanzen im Keimblattstadium (Raps) gehackt und mittels Hochgeschwindigkeitsaufnahmen ausgewertet © S Schwede, TUD
Um die Kompatibilität zu bereits vorhanden Geräten auf landwirtschaftlichen Betrieben zu erreichen, wurde zu den Modulen ein Baukastensystem bestehend aus Kopplungsmöglichkeiten an marktüblichen Hackrahmen inklusive einer optionalen Hubeinrichtung für eine bessere Konturführung und Sicherstellung der Arbeitstiefe entwickelt.
Die Konstruktion der Aktorik sowie die mechanische und elektronische Hardware zur Ansteuerung des laserbasierten Systems sind bereits umgesetzt (siehe Abb. 4). Zur Optimierung der Werkzeugführung, wurde eine modellbasierte Simulation entwickelt. Diese simuliert die zeitliche Dynamik der laserbasierten Beikrautregulierung in Reihenkulturen, insbesondere den Zeitbedarf für die Bewegung des Aktuators zum nächsten Ziel. Einstellbare Parameter der Simulation sind Lasereinwirkdauer, Aktuatordynamik sowie die Fahrgeschwindigkeit (siehe Abb. 5). Das Systemverhalten wurde unter verschiedenen, realistischen Beikrautdichten simuliert. So konnten Algorithmen entwickelt werden, welche die Bewegungsabläufe des Aktuators verbessern und die Effizienz der Beikrautentfernung steigern (siehe Abb. 6). Hieraus ergaben sich Anforderungen an das Aktuatorsystem wie maximale Geschwindigkeit, Beschleunigungs- und Bremsverhalten.
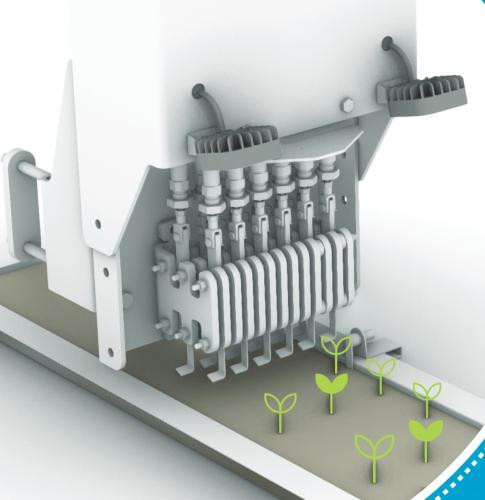
 Abbildung 4: Laserportal mit Aktuator basierend auf Parallellroboterkinematik und mit blauen (445nm) 36W Diodenlaser ausgestattet © S Schröder, TUB
Abbildung 4: Laserportal mit Aktuator basierend auf Parallellroboterkinematik und mit blauen (445nm) 36W Diodenlaser ausgestattet © S Schröder, TUB
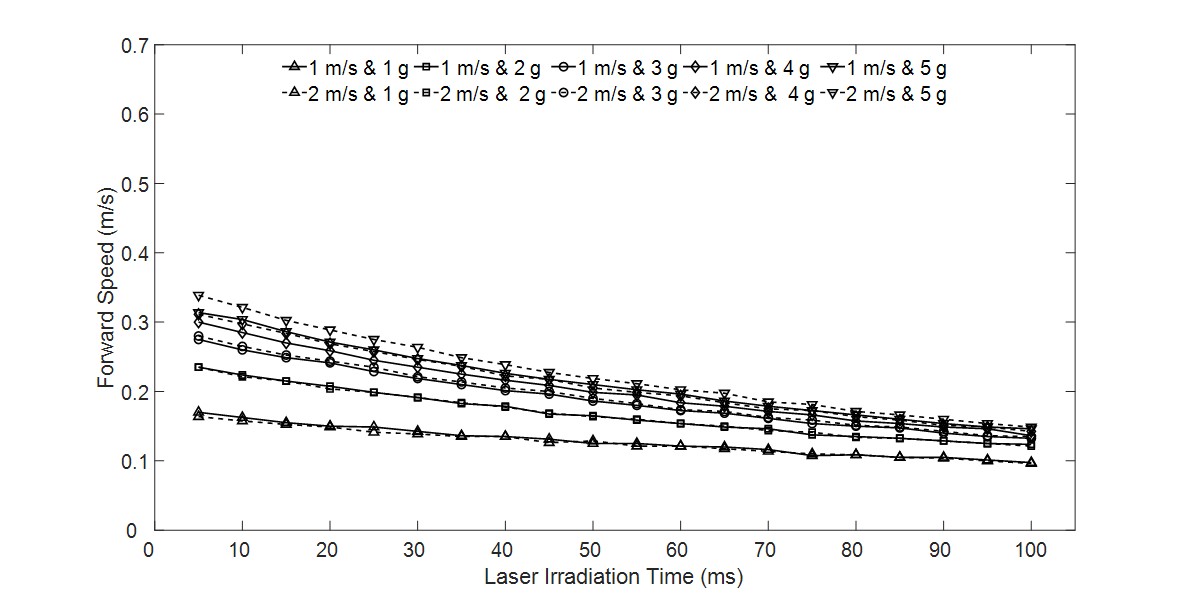 Abbildung 5: Maximale Vorwärtsgeschwindigkeit des Roboters gemittelt über die Unkrautdichte (1 Unkraut pro Rahmen bis 20 Unkräuter pro Rahmen) unter verschiedenen Bedingungen (Rahmengröße 0,1 m * 0,18 m) © A Ajali, ATB
Abbildung 5: Maximale Vorwärtsgeschwindigkeit des Roboters gemittelt über die Unkrautdichte (1 Unkraut pro Rahmen bis 20 Unkräuter pro Rahmen) unter verschiedenen Bedingungen (Rahmengröße 0,1 m * 0,18 m) © A Ajali, ATB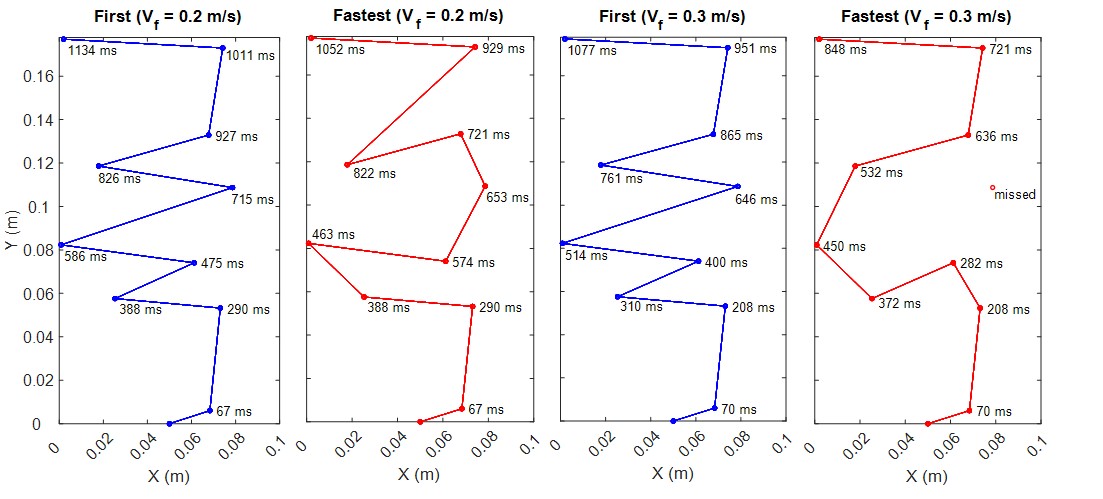 Abbildung 6: Einfluss des Aktuator-Bewegungsalgorithmus und der Vorwärtsgeschwindigkeit des Roboters auf den Unkrautentfernungsprozess. Der „First“-Algorithmus zielt auf das zuerst erkannte Unkraut im Blickfeld der Roboterkamera. Der „Fastest“-Algorithmus verfolgt einen ausgefeilteren Ansatz, indem er die zeitliche Nähe zum nächsten Ziel priorisiert © A Ajali, ATB
Abbildung 6: Einfluss des Aktuator-Bewegungsalgorithmus und der Vorwärtsgeschwindigkeit des Roboters auf den Unkrautentfernungsprozess. Der „First“-Algorithmus zielt auf das zuerst erkannte Unkraut im Blickfeld der Roboterkamera. Der „Fastest“-Algorithmus verfolgt einen ausgefeilteren Ansatz, indem er die zeitliche Nähe zum nächsten Ziel priorisiert © A Ajali, ATB
Die Konstruktion der Aktorik sowie die mechanische und elektronische Hardware zur Ansteuerung des laserbasierten Systems sind bereits erfolgreich umgesetzt worden (siehe Abb. 4). Zur Optimierung der Werkzeugführung wurde eine modellbasierte Simulation entwickelt. Diese bildet die zeitliche Dynamik der laserbasierten Beikrautregulierung in Reihenkulturen ab, insbesondere den Zeitbedarf für die Bewegung des Aktuators zum nächsten Ziel. Die Parameter der Simulation umfassen die Lasereinwirkdauer, die Dynamik des Aktuators sowie die Fahrgeschwindigkeit. Das Systemverhalten wurde unter verschiedenen, realistischen Beikrautdichten simuliert. Auf dieser Grundlage konnten Algorithmen entwickelt werden, die die Bewegungsabläufe der Werkzeuge optimieren und die Effizienz der Beikrautentfernung steigern (siehe Abb. 6). Darüber hinaus konnten konkrete Anforderungen an das Aktuatorsystem abgeleitet werden, wie maximale Geschwindigkeit, Beschleunigungs- und Bremsverhalten.
Der nächste Schritt für das laserbasierte System besteht darin, die Positionierung exakt über dem Pflanzenherz umzusetzen. Dies wird durch die Implementierung einer speziellen Pflanzenherzerkennung erreicht, die zusätzlich zur bereits vorhandenen Beikrauterkennung entwickelt und eingesetzt wird. Diese Maßnahme soll die Effektivität des Lasers weiter steigern. Weiterhin sind in dieser Saison noch erste Feldtests geplant.
Literatur
[1] Laber, H., Lattauschke G. (Hrsg.): Gemüsebau. Stuttgart (Eugen Ulmer Verlag). 4. Auflage 2023. S. 227 (ISBN 978-3-8186-1831-5)
Koordinator/in
Ansprechpartner/in
Partner
Kooperationspartner

Abbildungsquellen
- © Cornelia Weltzien, Leibniz-Institut ATB Potsdam (ATB); Sebastian Schröder, Technische Universität Dresden (TUD); Ali Ajali, Leibniz-Institut ATB Potsdam (ATB)