Mechanische Unkrautregulierung in einer Prozesskette auf Basis hochgenauer Positionsdaten
 Aufnahme des endgültigen MeProPos-Prototyps in einem unkrautfreien Feld © F Wanink, DNL-contact
Aufnahme des endgültigen MeProPos-Prototyps in einem unkrautfreien Feld © F Wanink, DNL-contact
Hintergrund
Die Unkrautbekämpfung im Gartenbau ist sehr zeitaufwendig, insbesondere im ökologischen Gartenbau, wo der Einsatz von Herbiziden und Pestiziden begrenzt ist. Es ist wichtig, Unkraut so früh wie möglich in unmittelbarer Nähe der Kulturen zu entfernen. Künstliche Intelligenz (KI) spielt eine immer wichtigere Rolle. Allerdings bleibt das Problem der Abstände zwischen den Pflanzen in der Reihe bestehen, was oft den Einsatz von Robotern verhindert. Eine Lösung für dieses Problem könnte darin bestehen, Pflanzen in einem Raster anzupflanzen und die Position jeder gepflanzten Pflanze mit einer Genauigkeit von weniger als 1,5 cm aufzuzeichnen.
Projektziel
Das Ziel des Projekts besteht darin, eine Prozesskette aus drei Maschinen (Sämaschine, Pflanzmaschine und Hackenmaschine) zu entwickeln, das auf einer präzisen Aussaat/Pflanzung in Rasterpositionen basiert. Dadurch kann die anschließende Unkrautbekämpfung sehr präzise durchgeführt werden. Eine Kultur, die in einem solchen Raster angelegt wurde, wird später vollflächig mit der Hackmaschine bearbeitet, wobei nur die jeweiligen Pflanzstandorte ausgelassen werden.
Methode
Im Rahmen von Precision Farming werden GNSS-Systeme wie GPS-Signale mit terrestrischen Systemen wie RTK (Real Time Kinematics) kombiniert, um die Positionsgenauigkeit für landwirtschaftliche Zwecke zu erhöhen. In der geplanten Anwendung werden alle zu säenden oder zu pflanzenden Kulturen präzise in einem an die Kultur angepassten Raster abgelegt. Die Abmessungen des Rasters hängen von der Kultur, der Sorte und den Umgebungsfaktoren ab. Die Steuerung und der Antrieb der Sä- und Pflanzmaschinen sowie der Hackmaschine erfolgen mittels GNSS-RTK-Signalen und Antrieb mit Servomotoren.
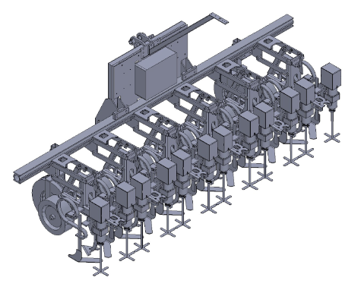 Computervisualisierung der MeProPos-Prozesskette (Sämaschine, Pflanzmaschine und Hackenmaschine) © F Wanink, DNL-contact
Computervisualisierung der MeProPos-Prozesskette (Sämaschine, Pflanzmaschine und Hackenmaschine) © F Wanink, DNL-contact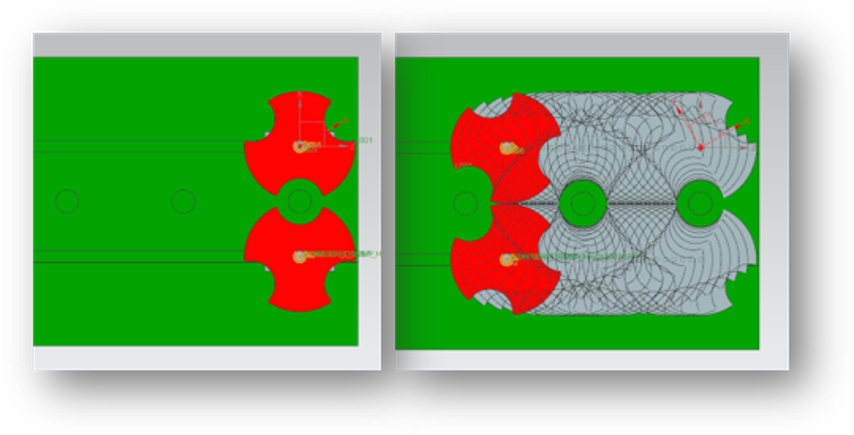 Computervisualisierung des GPS-gesteuerten Unkrautbekämpfungsgerätes © F Wanink, DNL-contact
Computervisualisierung des GPS-gesteuerten Unkrautbekämpfungsgerätes © F Wanink, DNL-contact
Derzeitige Ergebnisse
Das Projekt ist mittlerweile mit Erfolg abgeschlossen worden!
Im Projekt wurde zunächst recherchiert, wie genau wir die Pflanzen säen oder pflanzen müssen, wie wir die GPS-RTK-Signale nutzen können und welche Software wir verwenden werden.
Dann wurde eine Auswahl an Maschinen getroffen. Die Sämaschine ist eine UD 3000 von Schmotzer. Diese wurde vom Antriebskonzept her auf einen Elektroantrieb umgestellt, der für jedes Säelement einen Elektromotor vorsieht. Diese Motoren werden durch ein entsprechendes Steuerungsprogramm exakt entsprechend der Fahrgeschwindigkeit angesteuert, so dass jedes Korn reihen- und rastergenau gesät wird.
Als Pflanzmaschine wurde eine Reis- und Zwiebelpflanzmaschine von Miinoru-Kubota verwendet. Bei dieser Maschine wurde der vorhandene mechanische Antrieb durch einen Elektromotor ersetzt, der wie die Sämaschine mit Fahrgeschwindigkeit und je nach Standort angetrieben wird. Jede Pflanze wird präzise an einem vordefinierten Platz abgelegt.
Für die Grundlage der Hacke, um die sich alles dreht, wird eine 6-reihige Schmotzer-Sämaschine verwendet.
Zusätzlich zu den normalen Gänsefußhacken für den Raum zwischen den Reihen, ist sie mit zwei vertikal montierten Motoren pro Reihe ausgestattet. Auf der Welle jedes Motors befindet sich eine Scheibe mit drei Einschnitten. Beim Fahren fallen diese Aussparungen genau um die Pflanzen in der Reihe. Dadurch wird die gesamte Fläche gejätet, aber die angebauten Pflanzen werden geschont.
Der große Vorteil des Systems ist seine Arbeitsgeschwindigkeit. Die Hacke wurde mit bis zu 7,2 km/h getestet.
Das Projekt wird in einem weiteren Programm fortgesetzt und soll dann in drei marktfähigen Maschinen münden, die vom Konsortium vermarktet werden sollen.
 Nahaufnahme des MeProPos-Prototypen auf einem Traktor © F Wanink, DNL-contact
Nahaufnahme des MeProPos-Prototypen auf einem Traktor © F Wanink, DNL-contact
Koordinator/in
Partner
Abbildungsquellen
- © Frederik Wanink, DNL-contact GmbH & Co. KG