Qualitätssteigerung im Gemüsebau durch robotergestützte Schneckenbekämpfung in Beetkulturen
Hintergrund
Schnecken können Gemüse und Obst durch Fraß-, Schleim- und Kotspuren verunreinigen, wodurch eine Vermarktung unmöglich wird. Zur Vermeidung dieser Schäden wird auf herkömmliche Bekämpfungsmethoden wie Schneckenkorn gesetzt, Wirkeintritt und Erfolg sind jedoch verzögert und witterungsabhängig. Eine Alternative dazu ist die aufwendige Handsammlung der Schnecken. Um dem steigenden Druck durch invasive Arten entgegenzuwirken, wird eine alternative Methode zur Schneckenbekämpfung benötigt.
Projektziel
Das Ziel der Forschungs- und Entwicklungsarbeiten ist es, das manuelle Einsammeln von Schnecken durch einen Roboter zu ersetzen. Das Projekt hat das Potenzial, bestehende chemische Bekämpfungsmethoden zu substituieren und die Kosten für den Gartenbau zu senken. Der Roboter wird in der Lage sein, Schnecken zu detektieren und aufzusammeln und somit den Schädlingsbefall kontinuierlich zu überwachen.
Methode
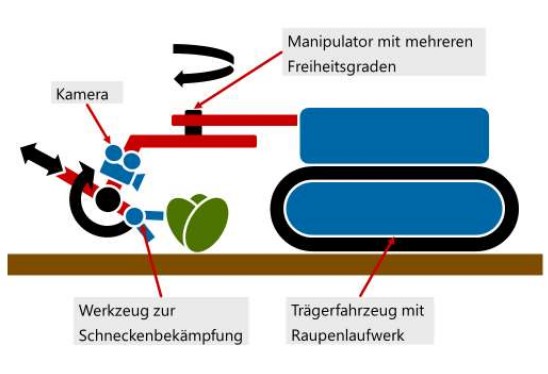
Der zu entwickelnde Schneckenroboter verfügt über eine Roboterplattform mit einem Raupenfahrwerk. Eine Navigation mittels GPS und Orientierung mit einer Kamera entlang von Salatreihen gewährt die präzise Bearbeitung der Fläche. Die Detektion der Schnecken erfolgt durch Bilderkennung mit Hilfe einer 3D-short-range-Kamera und Algorithmen wie YOLOv5. Die Bekämpfung der Schnecken erfolgt durch gezieltes Aufsaugen anhand der durch die Bildverarbeitung erreichten Positionsbestimmung der Schnecken auf dem Salat.
Derzeitige Ergebnisse
Die Bildverarbeitung und Positionsbestimmung seitens der Agrartechnik durch die Erkennung von Salatköpfen ist implementiert, ebenso wie die Absaugung der Schnecken, für die sich nach umfangreichen Versuchen des JKI zur Bestimmung der besten Bekämpfungsmethode entschieden wurde. Der Roboter war mit seinem Raupenfahrwerk und der Schneckenerkennung und -bekämpfung im Mai 2024 zu ersten Praxistests seiner Eignung einsatzbereit, jedoch wurde der Roboter durch einen technischen Defekt eines Akkus durch einen Brand zerstört. Derzeit wird der Roboter wieder aufgebaut sowie Verbesserungen umgesetzt, so dass die finalen Versuche im Frühjahr 2025 erfolgen können, um das Projekt bestmöglich abschließen zu können.
 Poster des Projektes für die Ökofeldtage 2023 © U Wilczek und O Jungwirth, Uni Kassel
Poster des Projektes für die Ökofeldtage 2023 © U Wilczek und O Jungwirth, Uni Kassel
 Prototyp des Roboters auf der Agritechnika 2023 © U Wilczek und O Jungwirth, Uni Kassel
Prototyp des Roboters auf der Agritechnika 2023 © U Wilczek und O Jungwirth, Uni Kassel
Koordinator/in
Ansprechpartner/in
Partner


Abbildungsquellen
- © Ulrike Wilczek und Oliver Jungwirth, Universität Kassel